【课题推荐发表期刊】
【课题背景】
机器人路径规划是一个涉及多个学科和技术的复杂研究领域,主要包括计算机科学、人工智能、机械工程和控制理论。其核心目的是在给定的环境中,为机器人找到一条从起点到终点的最佳路径,同时满足各种约束条件,如避免障碍物、最小化行进时间或距离等。目前主流算法有基于随机采样,基于搜索,基于群智能优化,基于仿生智能和基于学习等方法。随着技术的不断进步,特别是在人工智能和机器学习领域的突破,可以预见未来的路径规划算法将更加智能化、高效化,从而推动机器人技术的广泛应用和发展。
本课题研究将涉及到机器人在一定解空间与若干约束下的最优路径求解问题,为机器人在特定的运动环境中找到一条从起始状态到目标状态、可以避开障碍物的最优或者接近最优的路径。
【课题方向参考】
复杂非结构环境下的移动机器人路径规划方法
移动作业机器人的协调路径规划方法
机械臂的快速路径规划方法
【适合人群】
主修仪器科学与技术专业的研究生,有一定编程能力和数学基础,熟悉Matlab、Python。
【课题收获】
高质量论文一篇(SCI定向期刊)
SCI期刊投递与发表指导
结业证书
【导师介绍】
杨老师,研究员,985高校,博士
研究方向:机器人系统设计,路径规划,结构设计
以第一作者身份,在行业顶尖期刊/会议上发表8篇论文,包括ICMA,Biomimetic Intelligence and Robotics,Industrial Robot-The International Journal of Robotics Research and Application等
具备丰富的英文写作经验和学术指导经验;熟练使用matlab, python,Roboware,Q,SolidWorks, UG, Anasys等
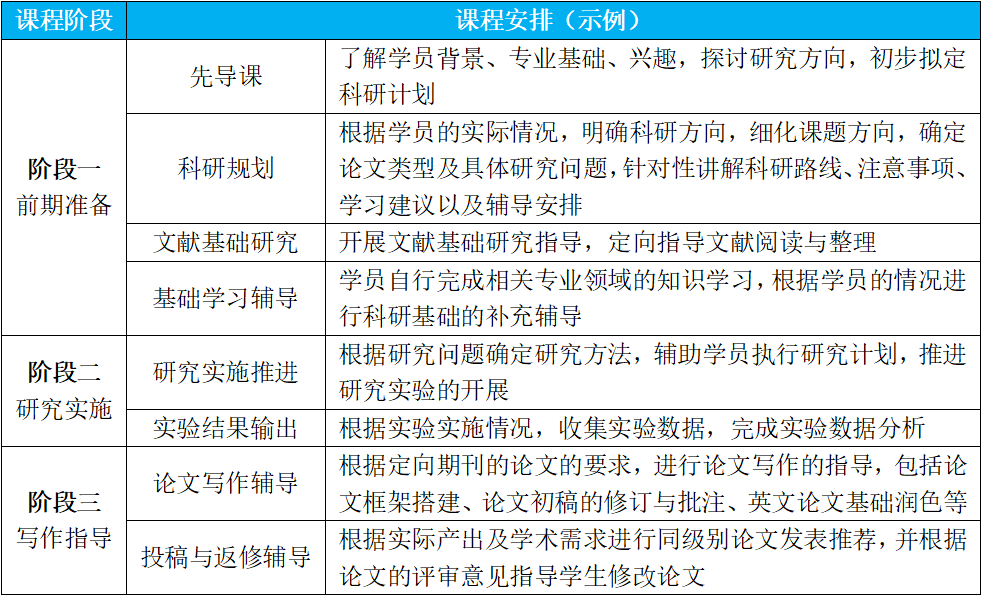
【课题安排】
研究周期与具体环境设定相关,具体视学员情况调整
【推荐阅读】